سگ رباتیک چهارپا برای بازی فوتبال در زمینهای چمن، شن و ماسه
سگ رباتیک چهارپا برای بازی فوتبال
Robotics in football
سگ رباتیک چهارپا برای بازی فوتبال در زمینهای چمن، شن و ماسه
تصور کنید در زمینی سرسبز، زیر نور خورشید، با بوی چمن تازه، در حال تماشای یک ربات چهارپا هستید که با مهارت توپ فوتبال را دریبل میکند. این ربات، هرچند به پای لیونل مسی نمیرسد، اما توانایی بینظیری در کنترل توپ روی زمینهای ناهموار مانند چمن، شن، ماسه، گل و برف دارد. محققان آزمایشگاه علوم کامپیوتر و هوش مصنوعی MIT (CSAIL) رباتی به نام DribbleBot توسعه دادهاند که با استفاده از هوش مصنوعی و یادگیری تقویتی، میتواند مانند یک ورزشکار حرفهای توپ را در زمینهای مختلف هدایت کند، حتی پس از افتادن دوباره بلند شود و بازی را ادامه دهد. این مقاله به معرفی DribbleBot، فناوری پشت آن، کاربردها، چالشها و آینده رباتیک در فوتبال میپردازد.
برای اطلاعات بیشتر در مورد فناوریهای هوش مصنوعی، مقاله هوش مصنوعی چیست؟ را مطالعه کنید.
DribbleBot چیست؟
DribbleBot یک ربات چهارپای هوشمند است که توسط آزمایشگاه CSAIL MIT توسعه یافته و قادر به دریبل کردن توپ فوتبال در زمینهای متنوع مانند چمن، شن، ماسه، گل و برف است. این ربات از ترکیبی از حسگرها، محاسبات داخلی و الگوریتمهای یادگیری تقویتی استفاده میکند تا حرکات توپ را کنترل کرده و با شرایط متغیر محیط سازگار شود. برخلاف رباتهای سنتی که روی سطوح صاف و سخت عمل میکنند، DribbleBot میتواند در زمینهای ناهموار حرکت کند و حتی پس از افتادن، دوباره بلند شده و توپ را بازیابی کند.
این پروژه توسط گیب مارگولیس، دانشجوی دکترای MIT، و یاندونگ جی، دستیار پژوهشی در آزمایشگاه Improbable AI، رهبری شده است. هدف آنها ایجاد رباتی بود که بهصورت خودکار یاد بگیرد چگونه پاهایش را برای دریبل کردن هماهنگ کند، بدون نیاز به برنامهریزی دستی برای هر نوع زمین. برای اطلاعات بیشتر در مورد رباتیک، مقاله دست رباتیکی تشخیصدهنده اشیا را بخوانید.

چگونه DribbleBot فوتبال بازی میکند؟
DribbleBot با استفاده از حسگرها و الگوریتمهای پیشرفته، محیط اطراف خود را درک کرده و توپ را با دقت کنترل میکند. فرآیند کار این ربات به شرح زیر است:
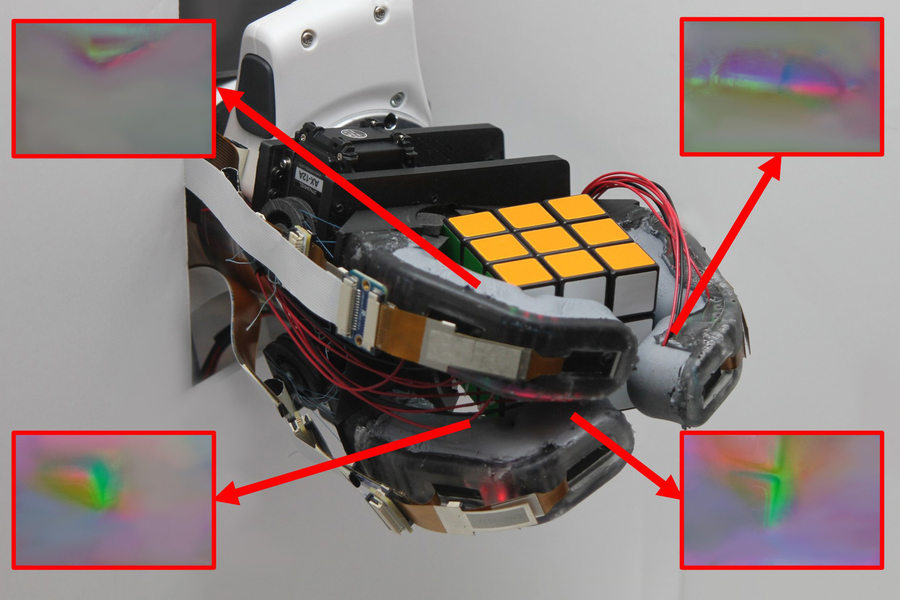
حسگرها و درک محیط:
DribbleBot مجهز به دوربینهای نصبشده روی سر و بدن و حسگرهای حرکتی است که به آن امکان میدهند موقعیت خود، توپ و ویژگیهای زمین (مانند اصطکاک) را درک کند. این حسگرها به ربات کمک میکنند تا بدون نیاز به دیدن مستقیم زمین (مانند برف یا شن)، شرایط را از طریق بازخورد حرکتی تحلیل کند.یادگیری تقویتی:
DribbleBot از یادگیری تقویتی (Reinforcement Learning) استفاده میکند. در این روش، ربات بدون دانش اولیه در مورد دریبل، از طریق آزمونوخطا یاد میگیرد. اگر توپ را بهدرستی هدایت کند، پاداش دریافت میکند و در صورت اشتباه، امتیاز منفی میگیرد. این فرآیند در شبیهسازیهای کامپیوتری با 4000 نسخه موازی از ربات انجام میشود، که سرعت یادگیری را 4000 برابر افزایش میدهد.کنترل حرکتی:
ربات دارای محرکهایی است که نیرو را به پاها منتقل میکنند. یک کنترلکننده بازیابی (Recovery Controller) به ربات امکان میدهد پس از افتادن دوباره بلند شود و به دریبل ادامه دهد. این ویژگی برای مدیریت زمینهای ناهموار و اختلالات محیطی حیاتی است.شبیهسازی پیشرفته:
DribbleBot در محیط شبیهسازیشدهای آموزش دیده که شامل ربات، توپ و زمینهای مختلف است. محققان پارامترهای فیزیکی مانند اصطکاک و مقاومت را تنظیم میکنند تا ربات برای شرایط واقعی آماده شود. این شبیهسازیها صدها روز تمرین را در چند روز واقعی فشرده میکنند.
یاندونگ جی میگوید: «رویکردهای قبلی دریبل را سادهسازی میکردند و فرض میکردند زمین صاف است. ما با ترکیب حرکت و دستکاری ماهرانه، این چالش را حل کردیم.»
برای یادگیری در مورد یادگیری تقویتی، دوره هوش مصنوعی را بررسی کنید.

چرا رباتهای چهارپا؟
اکثر رباتهای امروزی چرخدار هستند و برای سطوح صاف طراحی شدهاند. اما در شرایط پیچیده مانند فجایع طبیعی (زلزله، سیل) یا زمینهای ناهموار، رباتهای چرخدار کارایی ندارند. پولکیت آگراوال، استاد MIT و مدیر آزمایشگاه Improbable AI، میگوید: «هدف ما توسعه الگوریتمهایی برای رباتهای چهارپا است تا بتوانند در زمینهای چالشبرانگیز و غیرقابلدسترس حرکت کنند.»
رباتهای چهارپا مانند DribbleBot به دلایل زیر مناسبتر هستند:
- انعطافپذیری در حرکت: توانایی عبور از موانع و زمینهای ناهموار.
- تعادل و بازیابی: طراحی چهارپا امکان بلند شدن پس از افتادن را فراهم میکند.
- کاربردهای متنوع: از جستجو و نجات تا کاربردهای ورزشی و صنعتی.
برای اطلاعات بیشتر در مورد رباتهای چهارپا، مقاله رباتیک پیشرفته را بخوانید.

تاریخچه رباتیک در فوتبال
ایده استفاده از رباتها در فوتبال به دهه 1990 بازمیگردد. پروفسور آلن مکورث در مقالهای در سال 1992 با عنوان «در مورد دیدن رباتها» به این مفهوم اشاره کرد. در سال 1993، پروژه Robot J-League در ژاپن راهاندازی شد که به بحث در مورد استفاده از فوتبال برای پیشرفت علم و فناوری منجر شد. این پروژه جرقهای برای رقابتهای جهانی رباتهای فوتبالیست، مانند RoboCup، بود که هدف آن توسعه رباتهایی است که تا سال 2050 بتوانند با انسانها در فوتبال رقابت کنند.
برای اطلاعات بیشتر در مورد تاریخچه رباتیک، مقاله کنفرانسهای برتر هوش مصنوعی را مطالعه کنید.
مزایای DribbleBot
DribbleBot مزایای متعددی دارد که آن را به یک نوآوری برجسته تبدیل میکند:
- انطباق با زمینهای متنوع: توانایی دریبل در چمن، شن، ماسه، گل و برف.
- یادگیری خودکار: استفاده از یادگیری تقویتی برای بهبود مهارتها بدون برنامهریزی دستی.
- بازیابی پس از افتادن: کنترلکننده بازیابی برای مدیریت اختلالات.
- محاسبات داخلی: تمام حسگرها و پردازشها روی بدنه ربات انجام میشود، که آن را مستقل میکند.
- کاربردهای گسترده: از ورزش تا جستجو و نجات.
گیب مارگولیس میگوید: «DribbleBot میتواند در طبیعت حرکت کند، زیرا تمام حسگرها و محاسبات را روی بدنه خود حمل میکند.»
چالشها و محدودیتها
با وجود پیشرفتهای چشمگیر، DribbleBot با چالشهایی مواجه است:
- عدم درک هندسه زمین: ربات نمیتواند موانعی مانند پلهها یا شیبهای تند را مدیریت کند، زیرا در شبیهسازیهای فعلی این موارد آموزش داده نشدهاند.
- محدودیت در مهارتها: دریبل کردن هنوز به پیچیدگی حرکات انسانی نیست.
- نیاز به توسعه بیشتر: برای کاربردهای گستردهتر، مانند بازی کامل فوتبال یا وظایف پیچیدهتر، نیاز به بهبود الگوریتمها دارد.
- چالشهای سختافزاری: طراحی سبک و مقاوم برای زمینهای دشوار همچنان چالشبرانگیز است.
برای اطلاعات بیشتر در مورد چالشهای رباتیک، مقاله هوش مصنوعی و حریم خصوصی را بخوانید.
آینده رباتیک در فوتبال
DribbleBot تنها آغاز راه است. محققان MIT قصد دارند این فناوری را برای کارهای پیچیدهتر گسترش دهند، مانند:
- حرکت در زمینهای پیچیدهتر: آموزش ربات برای مدیریت پلهها، شیبها و موانع.
- کارهای ترکیبی: انتقال اشیا یا انجام وظایف جستجو و نجات با استفاده از پاها.
- رقابتهای رباتیک: بهبود مهارتها برای رقابت در رویدادهایی مانند RoboCup.
- کاربردهای غیرورزشی: استفاده در عملیات امداد، کشاورزی یا اکتشافات فضایی.
برای یادگیری در مورد آینده رباتیک، مقاله چگونه با پایتون وارد دنیای هوش مصنوعی شویم را بخوانید.
فناوریهای مشابه
DribbleBot تنها ربات فوتبالیست نیست. فناوریهای مشابهی مانند رباتهای انساننما در رقابتهای RoboCup یا رباتهای کنترلی فوتبالیست در مسابقات دانشآموزی (منبع) وجود دارند. با این حال، DribbleBot با توانایی حرکت در زمینهای ناهموار و یادگیری خودکار، یک گام فراتر رفته است.
مسیر توسعه و یادگیری فناوریهای مشابه
برای توسعه رباتهایی مانند DribbleBot، مهارتهای زیر ضروری است:
- برنامهنویسی: تسلط بر پایتون برای الگوریتمهای یادگیری تقویتی.
- یادگیری ماشین: دانش در مورد یادگیری عمیق.
- پردازش سیگنال و حسگرها: تحلیل دادههای محیطی.
- رباتیک: طراحی سختافزار و محرکها.
برای شروع، دوره دیتاساینس یا ایدههای پروژه پایتون را بررسی کنید.
سوالات پرتکرار درباره DribbleBot
1. DribbleBot چیست؟
DribbleBot یک ربات چهارپای توسعهیافته توسط MIT CSAIL است که با هوش مصنوعی و یادگیری تقویتی، توپ فوتبال را در زمینهای ناهموار دریبل میکند.
2. DribbleBot در چه زمینهایی میتواند بازی کند؟
این ربات میتواند در زمینهای چمن، شن، ماسه، گل و برف بازی کند.
3. چگونه DribbleBot یاد میگیرد دریبل کند؟
از طریق یادگیری تقویتی در شبیهسازیهای کامپیوتری، با پاداش برای حرکات موفق و جریمه برای اشتباهات.
4. چرا رباتهای چهارپا برای فوتبال مناسباند؟
رباتهای چهارپا انعطافپذیرتر از رباتهای چرخدار هستند و میتوانند در زمینهای ناهموار حرکت کنند.
5. محدودیتهای DribbleBot چیست؟
این ربات نمیتواند موانعی مانند پلهها یا شیبهای تند را مدیریت کند و مهارتهایش هنوز به پیچیدگی انسان نیست.
6. کاربردهای DribbleBot چیست؟
علاوه بر فوتبال، میتواند در جستجو و نجات، کشاورزی یا اکتشافات فضایی استفاده شود.
7. چگونه میتوانم در توسعه رباتهای مشابه مشارکت کنم؟
یادگیری پایتون، یادگیری ماشین و رباتیک ضروری است.
8. آیا DribbleBot تجاریسازی شده است؟
این فناوری هنوز در مرحله تحقیقاتی است، اما پتانسیل تجاریسازی دارد.
9. تفاوت DribbleBot با رباتهای فوتبالیست دیگر چیست؟
DribbleBot توانایی حرکت در زمینهای ناهموار و یادگیری خودکار را دارد، برخلاف رباتهای کنترلی سادهتر.
10. آینده رباتیک در فوتبال چیست؟
رباتها ممکن است در آینده در رقابتهایی مانند RoboCup با انسانها رقابت کنند و در وظایف پیچیدهتر مانند امداد استفاده شوند.
نتیجهگیری
DribbleBot یک نوآوری برجسته در رباتیک و هوش مصنوعی است که توانایی بازی فوتبال در زمینهای ناهموار را به نمایش میگذارد. این ربات با یادگیری تقویتی و حسگرهای پیشرفته، نهتنها در ورزش بلکه در کاربردهای عملی مانند جستجو و نجات پتانسیل بالایی دارد. برای ورود به این حوزه، میتوانید با دوره هوش مصنوعی یا دوره پایتون شروع کنید.
منابع خارجی:
دیدگاه و پرسش
-

اتنا حاجوی
3 سال پیش
ثبت امتیاز بسیار عالی
امیرحسین پورسمیع
3 سال پیش
ثبت امتیاز بسیار عالی
شش مقاله اخیر





دوره های برنامه نویسی برگزیده

1590000 تومان

950000 تومان
1790000 تومان

98000 تومان

100000 تومان

150000 تومان
مقالات برگزیده
مقالات مرتبط



.jpg)
دوره های برنامه نویسی جدید

.webp)


برنامه نویسی وب، طراحی سایت از مقدماتی تا پیشرفته ( پروژه محور)
71
(دانشجو)3.6
( 9 نظر )شش مقاله اخیر
مقالات مرتبط


دانلود رایگان کتاب و جزوه پایتون PDF ۱۴۰۴ – بهترین منابع یادگیری



