دست رباتیکی که توانایی دارد اشیاء را با یک لمس تشخیص دهد
دست ربایتک
Robotic hand
محققان MIT با الهام از انگشت انسان دست رباتیکی ساخته اند که از حسگر لمسی با وضوح بالا برای شناسایی دقیق یک شی پس از گرفتن یک بار آن استفاده می کند. بسیاری از دستهای رباتیک تمام حسگرهای قدرتمند خود را در نوک انگشتان قرار میدهند، بنابراین یک شی باید در تماس کامل اغلب نیاز به بازنگریهای متعدد است. نوک انگشتان باشد تا شناسایی شود، که میتواند چندین بار را بگیرد.طرحهای دیگر از حسگرهای با وضوح پایینتر استفاده میکنند که در امتداد تمام انگشت پخش شدهاند، اما این حسگرها جزئیات زیادی را ثبت نمیکنند، بنابراین اغلب نیاز به بازنگریهای متعدد است.
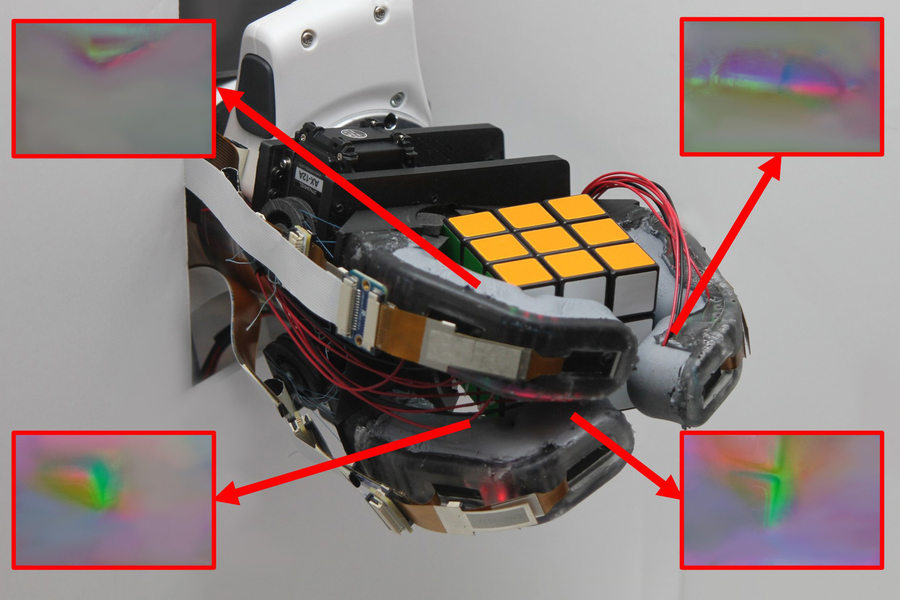
در عوض، تیم MIT یک انگشت روباتیک با یک اسکلت سفت و سخت که در یک لایه ی بیرونی نرم محصور شده است ساختند که دارای چندین حسگر با وضوح بالا در زیر "پوست" شفاف آن است. حسگرها که از دوربین و LED برای جمعآوری اطلاعات بصری در مورد شکل یک جسم استفاده میکنند، حسی پیوسته در تمام طول انگشت ارائه میکنند. هر انگشت داده های غنی را در بسیاری از قسمت های یک شی به طور همزمان می گیرد.
محققان در سال های اخیر توجه بسیار به استفاده از رباتیک و هوش مصنوعی در زندگی روز مره داشته اند نمونه از کار های محققین ساخت دست های رباتیک که توانایی همانند دست انسان یا حتی فراتر از تصور ساخت سگ های رباتیکی که همانند انسان بتواند فوتبال بازی کند و با همه این تفاسیر باید توجه داشت که هوش مصنوعی با این حال که هوشمند است ولی هوش خود را از انسان میگیرد در مورد این موضوع می توانید به مقاله چرا هوش مصنوعی انقدر که فکر میکنیم هوشمند نیست.
از دست رباتیک برای چه استفاده می شود؟
What is the robotic hand used for?
با استفاده از این طرح، محققان یک دست رباتیک سه انگشتی ساختند که می توانست اشیاء را تنها پس از یک بار گرفتن، با دقت 85 درصد شناسایی کند. اسکلت سفت، انگشتان را به اندازه کافی قوی میکند تا یک وسیله سنگین مانند مته را بردارند، در حالی که پوست نرم آنها را قادر میسازد تا به طور ایمن یک آیتم انعطافپذیر، مانند یک بطری پلاستیکی خالی آب، بدون له کردن آن را بگیرند. این انگشتان نرم سفت و سخت می تواند به ویژه در یک ربات مراقبت در خانه که برای تعامل با یک فرد مسن طراحی شده است مفید باشد. این ربات می تواند با همان دستی که برای کمک به حمام کردن فرد استفاده می کند، یک وسیله سنگین را از قفسه بلند کند.داشتن عناصر نرم و سفت و سخت در هر دستی بسیار مهم است، اما توانایی انجام حسسازی عالی در یک منطقه واقعاً بزرگ نیز همینطور است، به خصوص اگر بخواهیم کارهای دستکاری بسیار پیچیدهای را در نظر بگیریم، مانند کارهایی که دست خودمان میتواند انجام دهد. ساندرا لیو، دانشجوی فارغ التحصیل مهندسی مکانیک، یکی از نویسندگان این مقاله میگوید: هدف ما از این کار این بود که همه چیزهایی را که دستان انسان را بسیار خوب میکند، در یک انگشت روباتیک که میتواند کارهایی را انجام دهد که دیگر انگشتان رباتیک نمیتوانند انجام دهند، ترکیب کنیم.
انگشتی الهام گرفته از دست انسان
A finger inspired by the human hand
انگشت روباتیک از یک اسکلت درونی سفت و سخت و پرینت سه بعدی تشکیل شده است که در یک قالب قرار داده شده و در یک پوست سیلیکونی شفاف محصور شده است. ساختن انگشت در قالب نیاز به بست یا چسب برای نگه داشتن سیلیکون دارد.
محققان این قالب را با شکل منحنی طراحی کردند تا انگشتان روباتیک در هنگام استراحت کمی خمیده شوند، درست مانند انگشتان انسان.سیلیکون وقتی خم میشود چروک میشود، بنابراین فکر کردیم که اگر انگشت را در این حالت خمیده قالبگیری کنیم، وقتی آن را بیشتر منحنی کنید تا یک شی را بگیرد، به این اندازه چین و چروک ایجاد نمیکنید.
لیو میگوید: چین و چروکها از برخی جهات خوب هستند میتوانند به لغزش انگشت در امتداد سطوح بسیار نرم و آسان کمک کنند اما چین و چروکهایی که نتوانند آنها را کنترل کنند نمی خواهند.اسکلت درونی هر انگشت شامل یک جفت حسگر لمسی دقیق، معروف به سنسور GelSight است که در قسمتهای بالایی و میانی، زیر پوست شفاف تعبیه شده است. سنسورها طوری قرار میگیرند که دامنه دوربینها کمی همپوشانی داشته باشد و به انگشت حس مداوم در تمام طول خود بدهد.سنسور GelSight، بر اساس فناوری پیشگام در گروه Adelson، از یک دوربین و سه LED رنگی تشکیل شده است. هنگامی که انگشت یک شی را می گیرد، دوربین تصاویر را می گیرد زیرا LED های رنگی پوست را از داخل روشن می کنند.با استفاده از خطوط نورانی که در پوست نرم ظاهر میشوند، یک الگوریتم محاسبات رو به عقب را برای ترسیم خطوط روی سطح جسم درک شده انجام میدهد. محققان یک مدل یادگیری ماشینی را برای شناسایی اشیاء با استفاده از داده های تصویر خام دوربین آموزش دادند.
موانع هایی که در مسیر ساخت وجود داشته
Obstacles in the way of construction
موانع های متعددی در مسیر ساخت متحققیان وجود داشته است:
اول اینکه، سیلیکون تمایل به کنده شدن سطوح در طول زمان دارد.
لیو و همکارانش دریافتند که می توانند این لایه برداری را با افزودن منحنی های کوچک در امتداد لولاهای بین مفاصل در اسکلت درونی محدود کنند.هنگامی که انگشت خم می شود، خم شدن سیلیکون در امتداد منحنی های کوچک توزیع می شود که استرس را کاهش می دهد و از لایه برداری جلوگیری می کند. آنها همچنین چین و چروک هایی را به مفاصل اضافه کردند تا سیلیکون در هنگام خم شدن انگشت به اندازه کافی له نشود.
در حین عیب یابی طراحی آنها، محققان متوجه شدند که چین و چروک های موجود در سیلیکون از پاره شدن پوست جلوگیری می کند.
«مفید بودن چین و چروک ها یک کشف تصادفی بود. وقتی آنها را روی سطح سنتز کردند ، متوجه شدند که در واقع انگشت را از آنچه انتظار داشتند بادوام تر می کنند.
سخن پایانی
final word
هنگامی که آنها طراحی را کامل کردند، محققان با استفاده از دو انگشت که در الگوی Y قرار گرفته بودند و انگشت سوم به عنوان یک شست مخالف، یک دست رباتیک ساختند. هنگامی که دست یک شی را می گیرد (دو تصویر از هر انگشت) شش تصویر می گیرد و آن تصاویر را به یک الگوریتم یادگیری ماشینی می فرستد که از آنها به عنوان ورودی برای شناسایی شی استفاده می کند.از آنجایی که دست دارای حس لامسه است که تمام انگشتانش را می پوشاند، می تواند داده های لمسی غنی را از یک چنگ جمع آوری کند.
لیو میگوید: «اگرچه ما در انگشتان حس زیادی داریم، شاید افزودن یک حسگر به کف دست آن کمک کند تا تمایزات لمسی را حتی بهتر کند.در آینده، محققان همچنین میخواهند سختافزار را بهبود بخشند تا میزان ساییدگی و پارگی سیلیکون را در طول زمان کاهش دهند و به انگشت شست فعالتر کنند تا بتواند کارهای متنوعتری را انجام دهد.
این کار تا حدی توسط موسسه تحقیقاتی تویوتا، دفتر تحقیقات نیروی دریایی و پروژه SINTEF BIFROST پشتیبانی شد.


 حرفه_ای در سال ۲۰۲۵ – خدمات تخصصی آرته_سافت.webp)










.jpg)
.jpg)

.webp)



